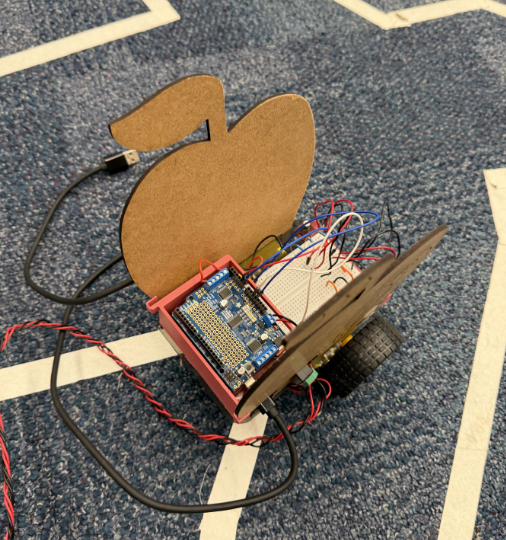
Our goal was to design a two wheeled autonomous vehicle capable of reliably following a white tape line using four infrared reflectance sensors. The system needed to combine mechanical design, sensor placement, and control logic into a compact, stable, and visually distinctive robot. We also wanted to create a playful, story driven aesthetic, hence the apple shaped chassis inspired by Lowly Worm’s car.
We implemented a closed loop control system using:
Sensor values were thresholded and fed into simple state logic that adjusted motor speeds in real time. The outer pair of sensors helped with wide turns and course recovery, while the inner pair ensured precise line tracking. A serial interface allowed live tuning of speed and threshold parameters during testing.
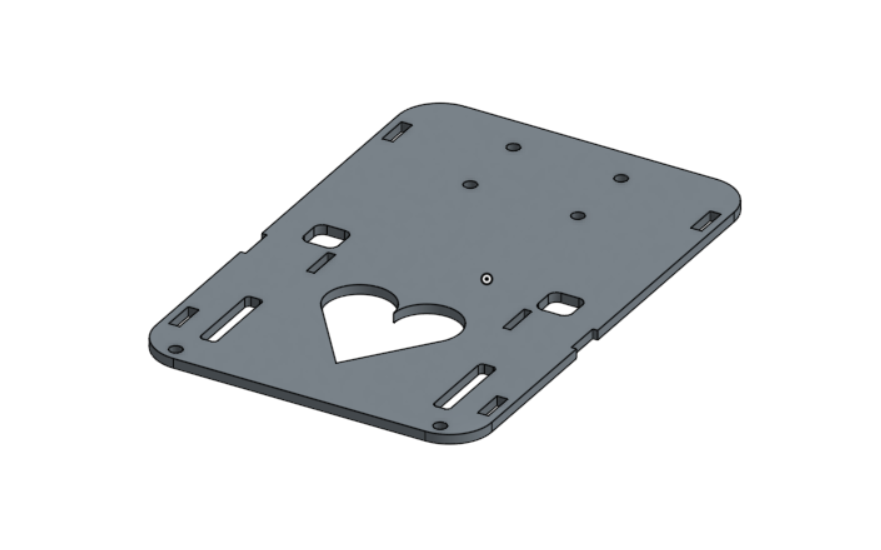
I was responsible for most of the mechanical design and fabrication, including:

After sensor calibration and parameter tuning, the Apple Car successfully completed the official course with a best lap time of 36 seconds. It demonstrated stable, consistent tracking under varying lighting conditions and reliably re-acquired the line after overshoot.
The combination of a playful mechanical design, a lightweight laser cut structure, and robust closed loop control produced a robot that was both functional and visually charming. The serial tunable motor control allowed quick adjustments during testing, which helped refine the robot’s behavior efficiently.
Overall, the project blended creative design with integrated electronics, resulting in a polished, expressive, and fully autonomous line following vehicle.
video of the car in action! apple1.mov - Google Drive